1. xArm-Python-SDK Installation
1. Introduction
This tutorial is written using the UFACTORY xArm 6 robotic arm, Windows system, and Python version 3.12.6 The xArm-Python-SDK is used for controlling UFACTORY robotic arms, such as xArm, Lite6, and 850.
Note: The xArm-Python-SDK only supports Python 3, and Python 3.10 or above is recommended.
2. Prerequisites
Before reading this tutorial, make sure you have:
- Familiarity with operating UFACTORY robotic arms.
- Understanding of Python 3 syntax and experience in Python programming.
- Knowledge of managing Python virtual environments.
3. Installation
3.1 Install via pip [Recommended]
In a Python virtual environment, use pip to install the xarm-python-sdk with the following command:
pip install xarm-python-sdk3.2 Install from Github Download
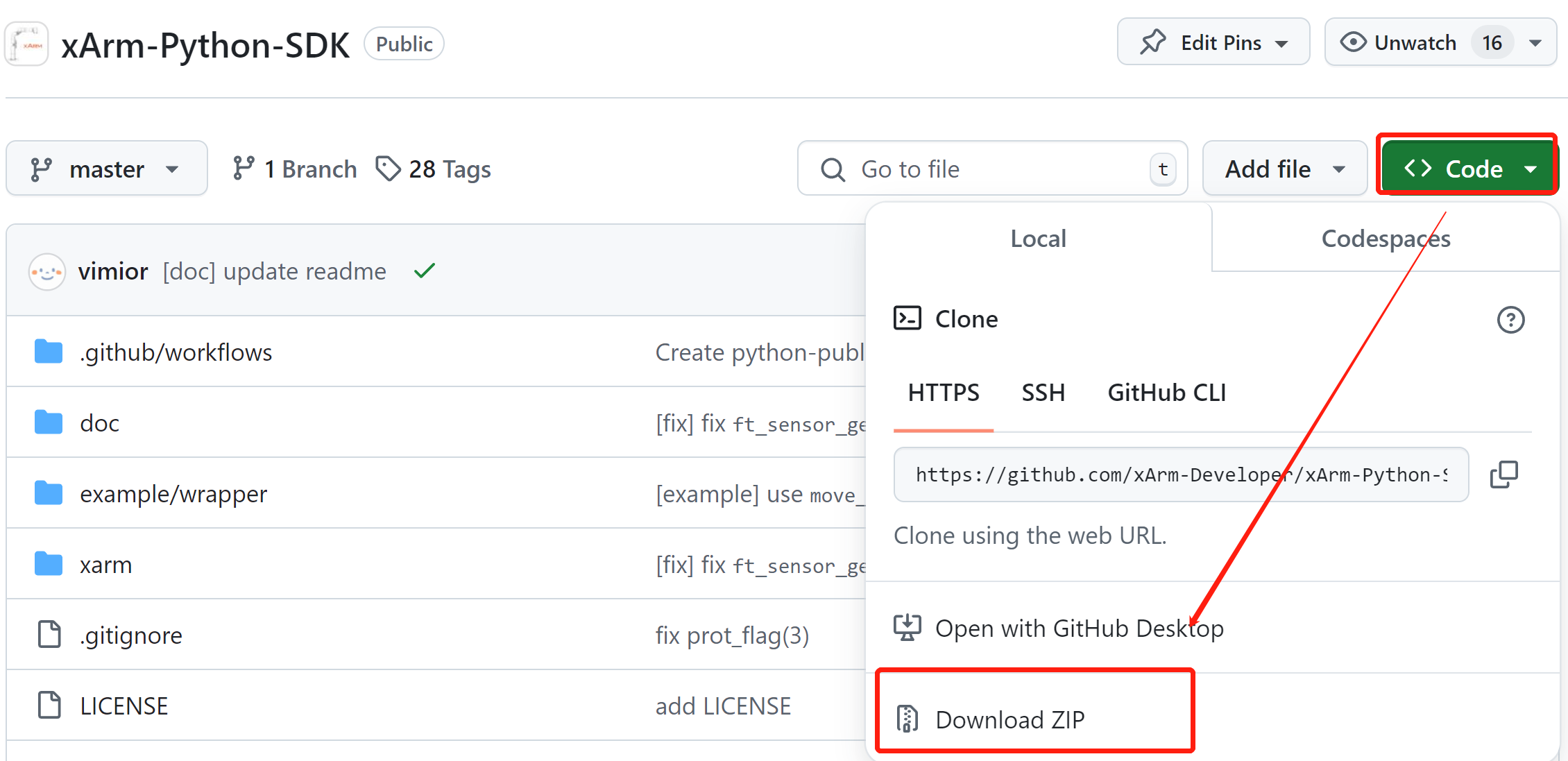
Download
Download using a browser
1-GitHub link for xArm-Python-SDK:https://github.com/xArm-Developer/xArm-Python-SDK
2-Download the xArm-Python-SDK
Download using Git command
git clone https://github.com/xArm-Developer/xArm-Python-SDK.gitInstall via Command
After extracting, navigate to the \xArm-Python-SDK-master folder, and use the following command to install.
- Windows
python setup.py install- Ubuntu Linux
python3 setup.py install