术语和定义
单位定义
| 参数 | Python-SDK | Blockly | 通信协议 |
|---|---|---|---|
| X(Y/Z) | 毫米(mm) | 毫米(mm) | 毫米(mm) |
| Roll(Pitch/Yaw) | 度(°) | 度(°) | 弧度(rad) |
| J1(J2 /J3/J4/J5/J6/J7) | 度(°) | 度(°) | 弧度(rad) |
| TCP速度 | 毫米/秒(mm/s) | 毫米/秒(mm/s) | 毫米/秒(mm/s) |
| TCP加速度 | 毫米/秒²(mm/s²) | 毫米/秒²(mm/s²) | 毫米/秒²(mm/s²) |
| TCP加加速度 | 毫米/秒³(mm/s³) | 毫米/秒³(mm/s³) | 毫米/秒³(mm/s³) |
| 关节速度 | 度/秒(°/s) | 度/秒(°/s) | 弧度/秒(rad/s) |
| 关节加速度 | 度/秒²(°/s²) | 度/秒²(°/s²) | 弧度/秒²(rad/s²) |
| 关节加加速度 | 度/秒³(°/s³) | 度/秒³(°/s³) | 弧度/秒³(rad/s³) |
术语和定义
控制器
为机械臂的核心部分,它是机械臂控制系统的集成。
末端执行器
末端执行器安装在机械臂手腕的前端,用来安装夹持器和专用工具(如机械爪、真空吸头等),可以直接执行工作任务。
使能机械臂
给机械臂上电,且开启机械臂电机,机械臂使能后,可正常开始运动。
TCP
工具中心点。(未设置末端执行器偏移时,为法兰盘中心)
TCP运动
目标位置为笛卡尔空间坐标点的运动,末端在运动中遵循指定的轨迹(圆弧,直线等)。
TCP负载(末端负载)
负载重量是指实际的(末端执行器+托运外物)的重量,单位是 kg; X/Y/Z 轴表示 TCP 的重心相对于默认工具坐标系(位于法兰中心)的位置,单位是 mm。
TCP偏移(末端执行器偏移)
设置 TCP(末端执行器)坐标系与定义在法兰中心的工具坐标系之间的相对偏移量,单位是 mm。
Roll/Pitch/Yaw
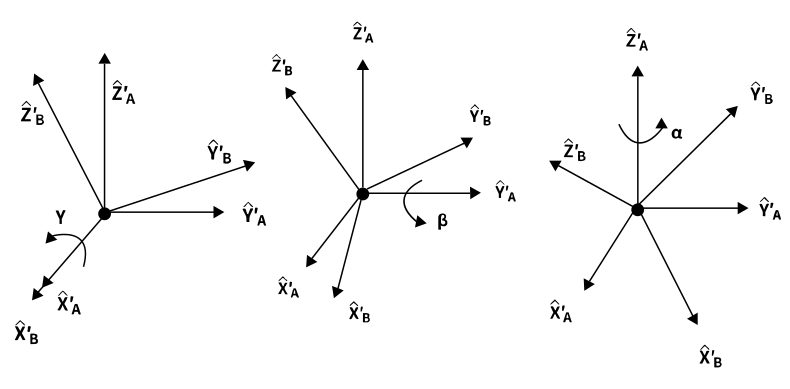
Roll / Pitch / Yaw 围绕所选坐标系(基本坐标系)的 X / Y / Z 顺序旋转。下面举例描述坐标系{B}姿态的一种方法:例如,坐标系 {B} 和已知的参考坐标系 {A} 重合。首先将 {B} 旋转 γ,然后旋转 β ,最后旋转 α.每次旋转都围绕固定的参考坐标系 {A} 的轴。这种方法称为 XYZ 固定角度坐标系,有时它们被定义为回转角(roll)、俯仰角(pitch)和偏转角(yaw)。
等效旋转矩阵为:
Rxyz(γ,β,α)=Rz(α)Ry(β)Rx(γ)
注意: γ 对应 roll;β对应pitch;α对应于yaw。
以上描述如下图所示:
轴角
Rx/Ry/Rz与Roll/Pitch/Yaw一样,使用3个值表示姿态,但不是三个旋转角度,而是一个三维旋转向量[x,y,z]和一个旋转角度phi(标量)的乘积。轴角表示的性质: 假设旋转轴为[x,y,z],旋转角度为phi。则轴角表示即为
[Rx, Ry, Rz] = [x * φ, y * φ, z * φ]注意: 其中[x,y,z]为单位向量,phi为非负值,因而[Rx,Ry,Rz]的向量长度(模)即可推算旋转角度,向量方向即为旋转方向。 如果想表示逆向旋转,则将旋转轴向量[x,y,z]取反,φ值不变。 使用phi和[x,y,z]同样可以推导出单位四元数的姿态表示q = [cos (φ / 2), sin (φ / 2) * x, sin (φ / 2) * y, sin (φ / 2) * z]。 举例: 当前TCP坐标系的姿态是基坐标系围绕某个空间向量旋转某个角度得到的。比如用基坐标系表示的旋转轴的向量为[1,0,0],旋转角度为180度(pi弧度),则这个姿态的轴角表示即为[π,0,0]。如果旋转轴 为[0.707,0.707,0],旋转角度为90度(π/2弧度),则轴角姿态为[0.707*(pi/2),0.707*(pi/2),0]。
坐标系
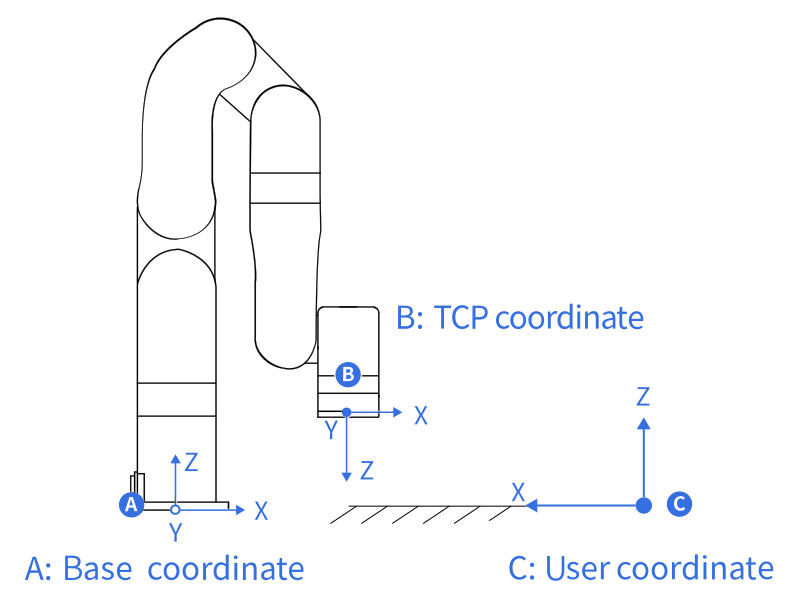
基坐标系
基坐标系是以机器人安装基座为基准、用来描述机器人本体运动的笛卡尔坐标系。 任何机器人都离不开基坐标系,也是机器人TCP在三维空间运动所必须的基本坐标系(面对机器人前后:X轴,左右:Y轴,上下:Z轴)
工具坐标系
由工具中心点TCP与坐标方位组成。 如果没有设置TCP偏移,那么默认工具坐标系位于法兰中心。是以工具中心点作为零点,机器人的轨迹参照工具坐标系。
用户坐标系
用户坐标系可定义为机器人运动范围内的任意位置,设定任意角度的X、Y、Z 轴,坐标系的方向根据客户需要任意定义。
手动模式
即示教模式或力矩模式,在该模式下,操作人员可直接手动控制机械臂。
示教灵敏度
示教灵敏度范围 1~5 个等级。设定的指越大,示教灵敏度等级越高,开启示教模式拖拽关节所需的力越小。
碰撞灵敏度
碰撞灵敏度范围 0~5 个等级,设置为 0 时表示不开启碰撞检测。设定的值越大,碰撞灵敏度等级越高,机械臂碰撞检测后所需的力越小。
GPIO
通用型之输入输出。 对于输入,可以通过读取某个寄存器来确定引脚电位的高低; 对于输出,可以通过写入某个寄存器来让这个引脚输出高电位或者低电位;
安全边界
该模式被激活后,可以限制机械臂笛卡尔空间的边界范围,如果工具法兰中心(TCP 偏移点)超出设置的安全边界,机械臂将停止运动。
缩减模式
该模式被激活后,机械臂的笛卡尔运动的最大运动线速度、关节运动的最大关节速度和关节范围将受到限制。