websocket API
Studio接口概述:
1. Studio通信协议:
- websoket:ws://{ip}:18333/ws
- http/1.1:http://{ip}:18333
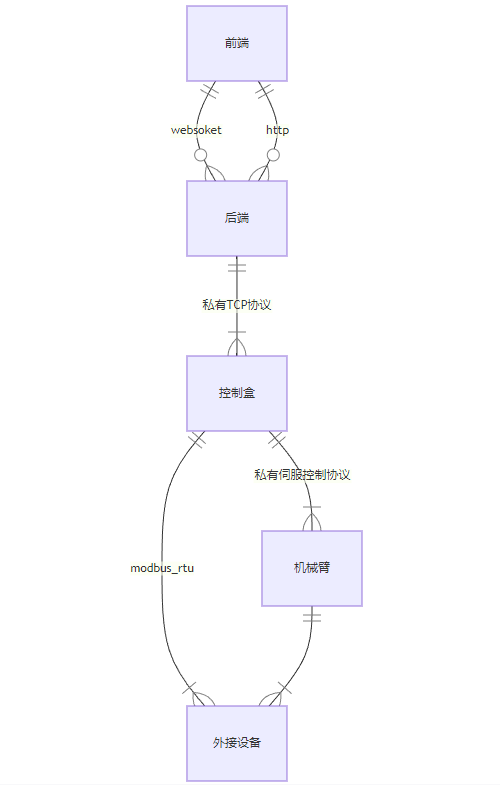
2. 通信流程图:
- front_end:前端(用户操作界面)
- Background:后端(封装xArm-Python-SDK)
- Controller:控制器
- Robot:机械臂
- uxbus:UFACTORY自定义协议(控制器与电机通信)
- u_modbus_tcp:UFACTORY自定义协议(PC与控制器通信)
- Externals:外接设备,例如BIO机械爪、xArm真空吸头、xArm机械爪等
3. 上报数据说明:
- 建立websocket连接后,后端会持续上报机械臂实时状态,以下是上报参数解析
{
"type": "report",
"cmd": "devices_status_keys_report",
"data": [
0. "xarm_connected", # 机械臂连接状态
1. "xarm_version", # 机械臂类型和固件版本
2. "xarm_port_name", # 控制器IP
3. "xarm_printed", # studio是否停止输出数据(内部使用)
4. "xarm_state", # 机械臂状态
5. "xarm_version_number", # 固件版本
6. "xarm_mode", # 机械臂模式
7. "xarm_collision_sensitivity", # 碰撞灵敏度
8. "xarm_teach_sensitivity", # 示教灵敏度
9. "xarm_tcp_load", # 负载
10. "xarm_tcp_offset", # 偏移
11. "xarm_world_offset", # 坐标系参数
12. "xarm_gravity_direction", # 重力方向
13. "xarm_paused", # xarm是否是暂停状态
14. "xarm_type", # 机械臂类型
15. "xarm_error_code", # 错误码
16. "xarm_warn_code", # 警告码
17. "xarm_tcp_pose", # TCP坐标
18. "xarm_joint_pose", # 关节角度
19. "xarm_axis_angle", # 机械臂轴角角度
20. "xarm_limit_acc", # TCP加速度限制
21. "xarm_limit_velo", # TCP速度限制
22. "xarm_current_velo", # 当前TCP速度
23. "xarm_current_acc", # 当前TCP加速度
24. "xarm_limit_angle_acc", # 关节加速度限制
25. "xarm_limit_angle_velo", # 关节速度限制
26. "xarm_current_angle_velo", # 当前TCP速度
27. "xarm_current_angle_acc", # 当前关节加速度
28. "xarm_tcp_jerk", # TCP加加速度
29. "xarm_joint_jerk", # 关节加加速度
30. "xarm_mtbrake", # 机械臂关节抱闸状态
31. "xarm_warn", # 警告信息
32. "xarm_error", # 错误信息
33. "xarm_servo_error", # 伺服错误
34. "xarm_is_ready", # 机械臂是否运动就绪状态
35. "xarm_is_verified", # studio密钥是否验证通过
36. "xarm_axis", # 关节轴数
37. "config", # 安全边界和缩减模式
38. "xarm_python", # pythonIDE运行状态和连接状态
39. "xarm_speed_percent", # 实时控制界面速度百分比
40. "xarm_acc_percent", # 实时控制界面加速度百分比
41. "xarm_initial_point", # 初始点位置
42. "xarm_position_step", # 位置步长
43. "xarm_attitude_step", # 姿态步长
44. "xarm_joint_step", # 关节步长
45. "xarm_end_tool_type", # 机械臂末端类型
46. "xarm_gripper_is_enable", # bio机械爪是否已使能
47. "gripper_error_code", # xArm机械爪错误码
48. "bio_gripper_error_code", # bio机械爪错误码
49. "robotiq_error_code", # robotiq错误码
50. "xarm_device_type", # 机械臂固件类型
51. "xarm_mount_degrees", # 机械臂安装方向参数(倾斜角度和旋转角度)
52. "current_clients_count", # 当前连接的客户端
53. "xarm_is_connecting", # studio是否有连接机械臂(内部使用)
54. "core_updated", # studio是否有更新
55. "firmware_updated", # 固件是否有更新
56. "channel", # 是测试环境还是正式环境
57. "xarm_counter_val", # 计数器值
58. "xarm_quick_access_switch", # 快速访问开关
59. "xarm_quick_access", # 快速访问的选项
60. "xarm_gpio_reset_config", # gpio状态
61. "xarm_default_tcp_acc", # 默认TCP加速度
62. "xarm_default_joint_acc", # 默认关节加速度
63. "xarm_cgpio_states", # 控制器输入、输出和模拟量参数
64. "xarm_voltages", # 机械臂电压信息
65. "xarm_currents", # 机械臂电流信息
66. "xarm_self_collision_params", # 自碰撞模式已经参数
67. "xarm_quick_copy_switch", # 是否打开快速复制
68. "xarm_run_package_blockly_switch",# 是否打包运行
69. "xarm_is_simulation_robot", # 是否是仿真机械臂模式
70. "bio_gripper_is_enabled", # bio机械爪是否已使能
71. "robotiq_is_activated", # robotiq机械爪是否已使能
72. "xarm_is_velocity", # 速度模式标志,根据此变量来设置速度模式(已不再使用)
73. "xarm_is_axis_angle", # 姿态控制方式(轴角/RPY)
74. "xarm_is_robot_arm", # 选择机械臂or控制盒
75. "line_track_error_code", # 直线滑轨错误码
76. "xarm_other_tool_type", # 末端工具类型(滑轨之类)
77. "ft_sensor", # 六维力矩传感器参数和状态
78. "lite6_record_mode", # lite6手动模式是否打开
79. "lite6_ti2_status", # lite6末端示教按钮状态
80. "reduced_states", # 缩减模式状态
81. "safe_border_states", # 安全边界状态
82. "xarm_end_otherCuboid_param", # 末端工具长方体参数
83. "xarm_end_otherCylinder_param", # 末端工具圆柱体参数
84. "joint_exceed_axis", # 关节超限时的轴数
85. "xarm_is_show_axis_angle" # 3D界面展示是否使用轴角模式
]
}