xArm 控制器 RS-485(Modbus RTU)功能使用手册
1. 概述
本手册用于说明 UFACTORY xArm 控制器的 RS-485 通信功能,以及其在 Modbus RTU 协议下的使用方法。
当前控制器已支持:
- Modbus RTU 主站(Master)功能
- Modbus RTU 从站(Slave)功能(控制器AC1320或以上,AC8520或以上,固件V2.7.104或以上)
2. Modbus RTU 主站模式
xArm 作为 Modbus 主机,主动访问外部 485 从机。
2.1 接口定义
| 端子 | 说明 | |
|---|---|---|
| M_A | RS-485 A / D+ | 主机 |
| M_B | RS-485 B / D- | 主机 |
| GND | 信号地 |
2.2 通信参数
| 参数 | 默认 | |
|---|---|---|
| 波特率 | 2000000 | 4800, 9600, 19200, 38400, 57600, 115200, 230400, 460800, 921600, 1000000, 1500000, 2000000, 2500000 |
| 数据位 | 8 | |
| 停止位 | 1 | 1,2 |
| 校验位 | None | 无(N),奇校验(O), 偶校验(E); (0-2) |
| 超时时间 | 50 | 1-9999ms |
2.3 控制方式
2.3.1 UFACTORY Studio
RS-485端口: 控制器 协议:Modbus RTU
此页面会在填入的命令后自动增加CRC。 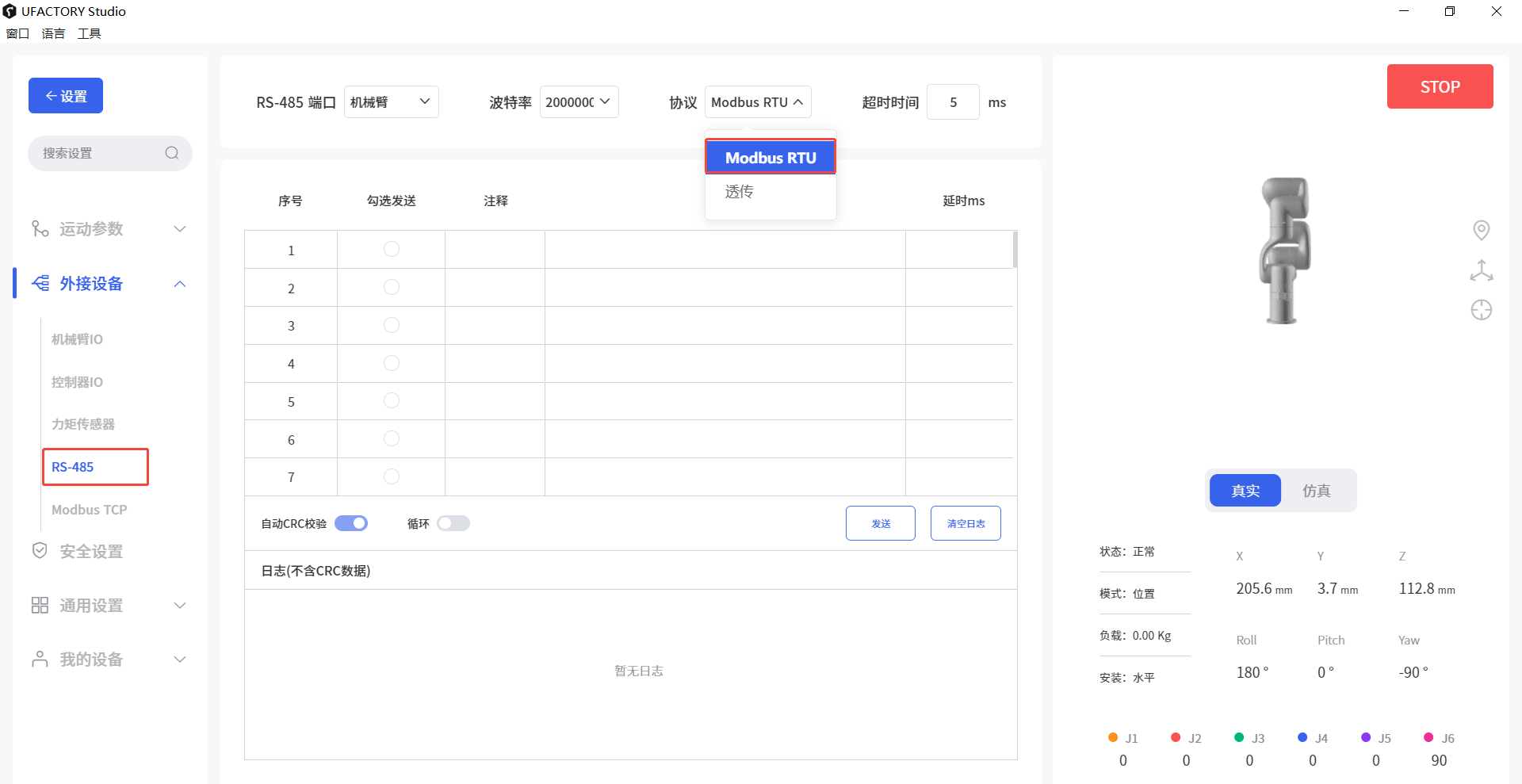
2.3.2 Python SDK
- 设置控制器端波特率
arm.set_rs485_baudrate(200000, target='control_box')- 设置超时时间
arm.set_rs485_timeout(1000, target='control_box')- 发送数据
arm.set_rs485_data([0x08, 0x06, 0x01, 0x00, 0x00, 0x01], target='control_box')3. Modbus RTU 从站模式
xArm 作为 Modbus 从机,被 PLC 或上位机访问。
3.1 接口定义
| 端子 | 说明 | |
|---|---|---|
| L_A | RS-485 A / D+ | 从机 |
| L_B | RS-485 B / D- | 从机 |
| GND | 信号地 |
3.2 通信参数
| 参数 | 默认 | 参数范围 |
|---|---|---|
| 从机地址 | 1 | 1-247 |
| 波特率 | 9600(1) | 4800, 9600, 19200, 38400, 57600, 115200, 230400, 460800, 921600, 1000000, 1500000, 2000000; (0-12) |
| 数据位 | 8 | |
| 停止位 | 1 | 1, 2 |
| 校验位 | None(0) | 无(N),奇校验(O), 偶校验(E); (0-2) |
3.3 参数修改
修改参数
python
arm.set_modbusrtu_params(slave_id=1, baudrate=9600, stopbits=1, parity=0)获取参数
python
arm.get_modbusrtu_params()输出示例
text
(0, [1, 9600, 1, 0])3.4 寄存器映射示例
3.4.1 功能码
- 离散输入寄存器
- 0x02:读取多个寄存器的值
- 输入寄存器
- 0x04:读取多个寄存器的值
- 线圈状态寄存器:
- 0x01:读取多个寄存器的值
- 0x05:写单个寄存器的值
- 0x0F:写多个寄存器的值
- 保持寄存器:
- 0x03:读取多个寄存器的值
- 0x06:写单个寄存器的值
- 0x10:写多个寄存器的值
- 0x16:以掩码的形式写单个寄存器的值
- 0x17:写多个寄存器的值,并读多个寄存器的值
3.4.2 状态寄存器(只读)
离散输入状态寄存器(1位,只读)
| 地址(十进制) | 地址(十六进制) | 说明 |
|---|---|---|
| 0 ~ 31 | 0x00 ~ 0x1F | 32路控制器的数字输⼊IO (当前仅16路有效) |
| 32 ~ 39 | 0x20 ~ 0x27 | 8路末端⼯具的数字输⼊IO (当前仅2路有效) |
| 40 ~ 127 | 0x28 ~ 0x7F | 保留 |
输⼊寄存器(16位, 只读)
| 地址(十进制) | 地址(十六进制) | 说明 |
|---|---|---|
| 0 ~ 1 | 0x00 ~0x01 | 32路控制器的数字输⼊IO, 每1位表⽰1路IO (当前仅16路有效) |
| 2 | 0x02 | 8路末端⼯具的数字输⼊IO, 每1位表⽰1路IO (当前仅2路有效) |
| 3 ~ 6 | 0x03 ~0x06 | 4路控制器的模拟输⼊IO, 寄存器的值是实际值的1000倍 (当前仅2路 有效) |
| 7 ~ 10 | 0x07 ~0x0A | 4路末端⼯具的模拟输⼊IO, 寄存器的值是实际值的1000倍 (当前仅2 路有效) |
| 11 ~ 31 | 0x0B ~0x1F | 保留 |
| 32 | 0x20 | 机械臂的错误码 |
| 33 | 0x21 | 机械臂的警告码 |
| 34 ~ 35 | 0x22 ~0x23 | 计数器的值 (0x22存储计数器的⾼16位, 0x23存储计数器的低16位) |
| 36 ~ 63 | 0x23 ~0x3F | 保留 |
| 64 ~ 72 | 0x40 ~0x48 | 机械臂的x/y/z/roll/pitch/yaw/rx/ry/rz值, 寄存器的值是实际值的10倍 (单位: mm, 度) |
| 73 ~ 76 | 0x49 ~0x4C | 机械臂的TCP负载mass(1000倍)/center_x(10倍)/center_y(10 倍)/center_z(10倍) (单位: kg, mm) |
| 77 ~ 82 | 0x4D ~0x52 | 机械臂的TCP偏移, 寄存器的值是实际值的10倍(单位: mm, 度) |
| 83 ~ 88 | 0x53 ~0x58 | 机械臂的基座标偏移, 寄存器的值是实际值的10倍(单位: mm, 度) |
| 89 ~ 95 | 0x59 ~0x5F | 机械臂各关节(J1-J7)的⾓度, 寄存器的值是实际值的10倍(单位: 度) |
| 86 ~ 102 | 0x60~0x66 | 机械臂各关节(J1-J7)的温度 (单位: 摄⽒度) |
| 103 ~ 109 | 0x67~0x6D | 机械臂各关节(J1-J7)的速度, 寄存器的值是实际值的10倍(单位: 度/s) |
| 110 | 0x6E | 机械臂的TCP速度, 寄存器的值是实际值的10倍(单位: mm/s) |
| 111 ~ 127 | 0x6F ~0x7F | 保留 |
3.4.3 控制寄存器(读写)
线圈状态寄存器(1位, 可读可写)
| 地址(十进制) | 地址(十六进制) | 说明 |
|---|---|---|
| 0 ~ 31 | 0x00 ~ 0x1F | 32路控制器的数字输出IO (当前仅16路有效) |
| 32 ~ 39 | 0x20 ~ 0x27 | 8路末端⼯具的数字输出IO (当前仅2路有效) |
| 40 ~ 127 | 0x28 ~ 0x7F | 保留 |
| 128 ~ 134 | 0x80 ~ 0x86 | 关节(J1-J7)的报闸状态 |
| 135 ~ 141 | 0x87 ~ 0x8D | 关节(J1-J7)的使能使能状态 |
| 142 | 0x8E | 缩减模式(0关闭, 1开启) |
| 143 | 0x8F | 围栏模式(0关闭, 1开启) |
| 144 | 0x90 | 暂停运动控制(0表⽰不是暂停, 1表⽰暂停) |
| 145 | 0x91 | 停⽌运动控制(0表⽰不是停⽌, 1表⽰停⽌) |
| 146 ~ 159 | 0x92 ~ 0x9F | 运动模式(0表⽰不是处于该模式, 1表⽰处于该模式), 分别对应模式0-13 |
| 160 ~ 255 | 0xA0 ~ 0xFF | 保留 |
| 256 ~ 511 | 0x100 ~ 0x1FF | ⽤户⾃定义使⽤ |
保持寄存器(16位, 可读可写)
| 地址(十进制) | 地址(十六进制) | 说明 |
|---|---|---|
| 0 ~ 1 | 0x00~0x01 | 32路控制器的数字输出IO, 每1位表⽰1路IO (当前仅16路有效) |
| 2 | 0x02 | 8路末端⼯具的数字输出IO, 每1位表⽰1路IO (当前仅2路有效) |
| 3 ~ 6 | 0x03 ~ 0x06 | 4路控制器的模拟输出IO, 寄存器的值是实际值的1000倍 (当前仅2路有效) |
| 7 ~ 10 | 0x07 ~ 0x0A | 4路末端⼯具的模拟输出IO, 寄存器的值是实际值的1000倍 (当前仅0路有 效) |
| 11 | 0x0B | Modbus RTU从机ID |
| 12 | 0x0C | Modbus RTU串口波特率 |
| 13 | 0x0D | Modbus RTU串口停止位 |
| 14 | 0x0E | Modbus RTU串口校验位 |
| 15~31 | 0x0F ~ 0x1F | 保留 |
| 32 | 0x20 | 机械臂模式 |
| 33 | 0x21 | 机械臂状态 |
| 34 ~ 47 | 0x22 ~ 0x2F | 保留 |
| 48 ~ 63 | 0x30 ~ 0x3F | 离线(Blockly)任务 (仅⽀持通过0x10功能码往0x30地址写最多16个寄存器 的值来触发离线任务, 每个寄存器的值对应Blockly⼯程名, 1对应00001, 12对应00012) |
| 64 ~ 255 | 0x40~0xFF | 保留 |
| 256 ~ 511 | 0x100~0x1FF | 保留 |